密碼找回
賬號(hào)找回
刪除信息
常見問題
GYB751富士伺服電機(jī)維修收藏學(xué)習(xí)
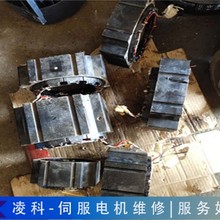
機(jī)械手ALXION伺服電機(jī)維修具體實(shí)操
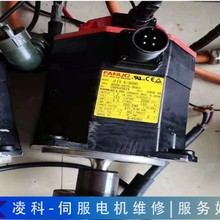
奧林巴斯OLYMPUS伺服電機(jī)無反應(yīng)維修飛車
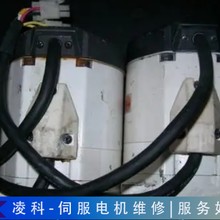
電梯杰美康伺服電機(jī)維修真實(shí)反饋
2年
微信在線
13961122002 3228134024
折彎機(jī)LS伺服電機(jī)維修客戶推薦
¥358
R88M-K4K020T-BS2-ZOmron伺服電機(jī)維修服務(wù)周到
機(jī)械手VICKERS伺服電機(jī)維修客戶推薦
HEIDENHAIN電機(jī)維修技術(shù)高
伺服壓力機(jī)科爾摩根DD馬達(dá)維修省心省力
SIMOTICSTN西門子伺服電機(jī)維修具體實(shí)操